
Welcome to our dedicated research page on assistive robotics. We focus on enhancing human-robot interaction to facilitate seamless and intuitive engagements between individuals with disabilities and robotic systems. We prioritize real-user needs by emphasizing direct engagement and conducting extensive user testing, which includes qualitative interviews, lab testing, and in-home evaluations. This approach helps us develop adaptive technologies that are not only accessible and effective but also genuinely improve the quality of life for users with diverse needs.
Projects
- Long-Term Lenses on Wheelchair-Mounted Robotic Arm Assistance
-
This research captures the perspectives of long-term robotic arm users, highlighting how these devices facilitate everyday tasks and promote independence. It also identifies barriers to effective use and proposes design recommendations for future assistive manipulators. This work underscores the importance of understanding the user-technology interaction over time to better cater to the needs of individuals with disabilities.
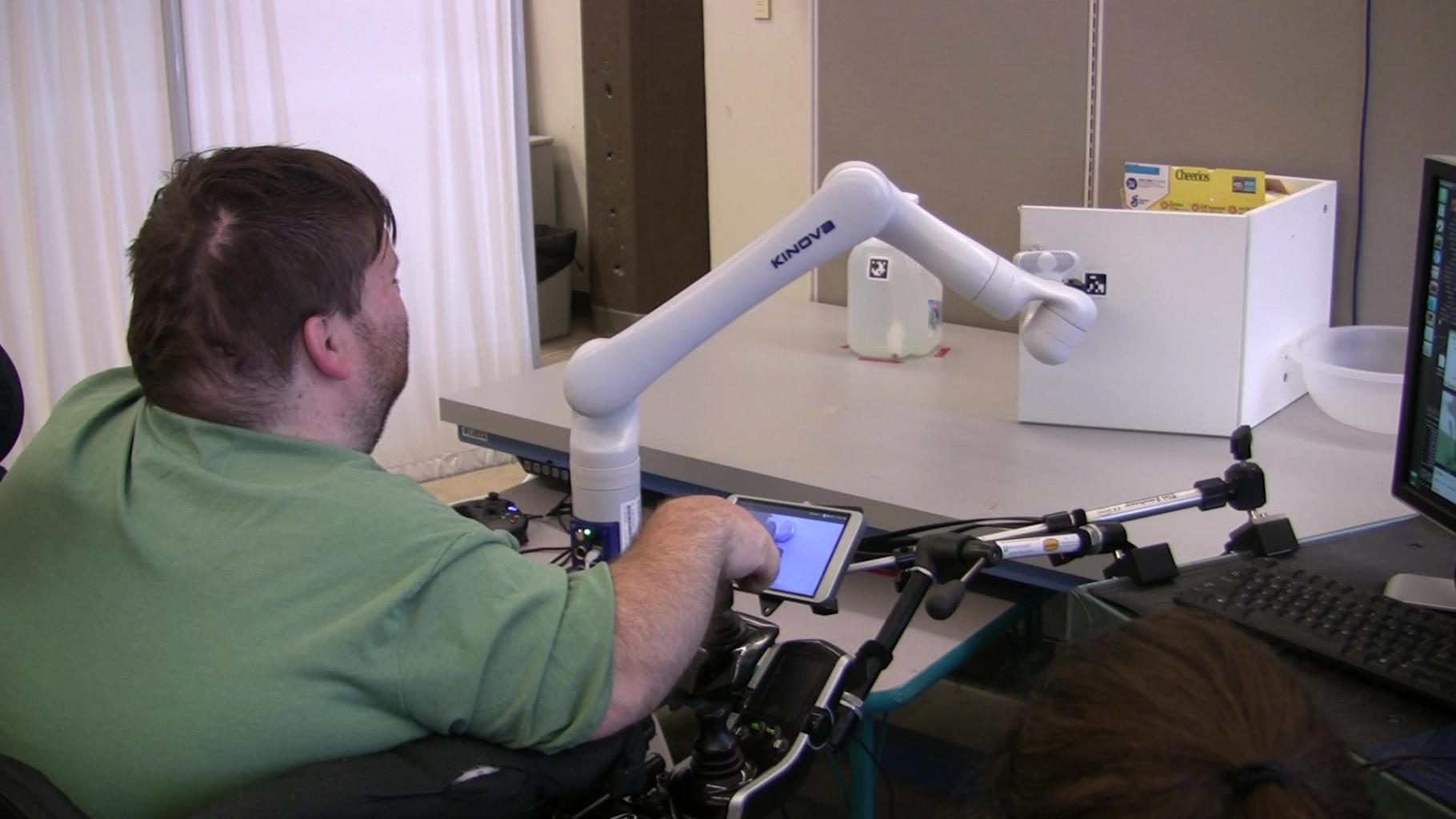
- Vision-Guided Shared Control for Assistive Robotic Manipulators
-
Achieving efficient control of an assistive robotic manipulator (Arm) can be challenging due to the multiple degrees of freedom of an ARM that need to be controlled. Our vision-guided shared (VGS) control system enables users to direct the gross motion of the ARM via teleoperation, while the ARM autonomously handles fine manipulations. This system has been tested in both lab and home environments by power wheelchair users with upper limb impairments.
- Teaching Robots to Assist Through Imitation Learning
-
This is a collaborative project (PI: Dr. Zackory Erickson, Carnegie Mellon University). It proposes an Incrementally Learned Shared Autonomy (ILSA) framework, which incrementally learns and improves a shared controller as users repeatedly perform tasks. ILSA eliminates the need for extensive pre-collected expert demonstrations and provides substantially improved manipulation assistance with only a few interactions.
- An Assistive Robot Manipulator to Support Individuals with ALS
-
This is a collaborative project with Hello Robot. We focus on iteratively developing user interfaces that allow individuals with ALS to effectively interact with the Stretch robot, accommodating varying levels of mobility and motor capabilities. In collaboration with our stakeholder advisory group, we are creating interfaces that facilitate user teleoperation in seamless integration with the robot's autonomous functions. These interfaces are designed for ease of use and adaptability, compatible with various input devices including joysticks, eye-tracking systems, and switches.
- Human-Robot Contact for Bathing and Skin-Care Assistance
-
This is a collaborative project (PI: Dr. Nancy Pollard, Carnegie Mellon University). This project develops a unique soft robot manipulator that can apply controlled pressure across the complex contours of the human body. It involves developing control algorithms to ensure the manipulator moves effectively and safely, maintaining clear contact with the person, as well as creating innovative interaction methods that allow individuals with paralysis and their caregivers to intuitively guide the robot's actions, personalizing the care experience while maximizing comfort and trust during procedures.
- A Knee Stress-Relief Powered Exoskeleton for Veterans with Knee Osteoarthritis
-
This is a collaborative project (PI: Dr. Ann Spungen, Bronx VA). This project conducts detailed biomechanical assessments to explore how the soft knee exoskeleton delivers active assistance and how users adapt to this support. By analyzing the interactions between the exoskeleton and its users, we aim to facilitate further customization and improvement, enhancing the device's ability to reduce knee stress and improve mobility.
Recent Presentations & Publications
- 2024
-
Styler, B. K., Deng, W., Simmons, R., Admoni, H., Cooper, R., & Ding, D. (2024, March). Exploring Control Authority Preferences in Robotic Arm Assistance for Power Wheelchair Users. In Actuators (Vol. 13, No. 3, p. 104). MDPI.
- 2023
-
Chung, C. S., Styler, B. K., Wang, E., & Ding, D. (2023). Robotic Assistance in Action: Examining Control Methods for Long-Term Owners of Wheelchair-Mounted Robotic Arms. In Proceedings of the RESNA Annual Conference.
Wang, E., Styler, B., & Ding, D. (2023, August). Autonomous or Manual Control? Qualitative Analysis of Control Perceptions From Current Robotic Arm Owners. In 2023 32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 449-455). IEEE.
- 2022
-
Ding, D., Styler, B., Chung, C. S., & Houriet, A. (2022). Development of a vision-guided shared-control system for assistive robotic manipulators. Sensors, 22(12), 4351.
Styler, B., Chung, C. S., Houriet, A., & Ding, D. (2022). Software design of an assistive robotic manipulator for versatile control authority in multi-action manipulation tasks. In RESNA Annual Conference.
- 2021
-
- 2020
-